
算力与功耗矛盾
大模型、感知与控制同时在线,电池续航与散热成为系统上限;单纯堆算力会带来成本、体积与可靠性问题。
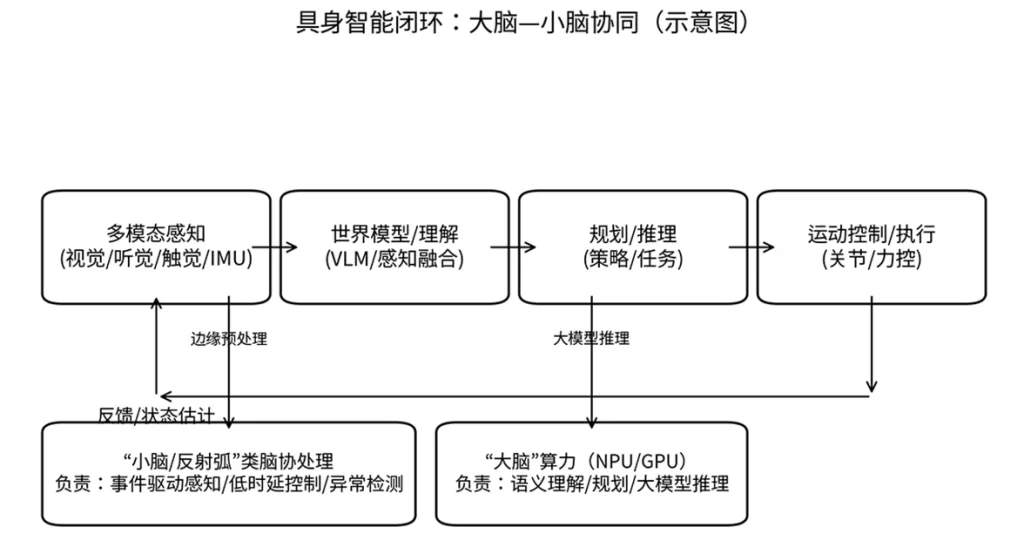
运动控制的确定性与低抖动
行走平衡、抓取力控需要毫秒级甚至亚毫秒级闭环;延迟抖动(jitter)比平均延迟更致命。
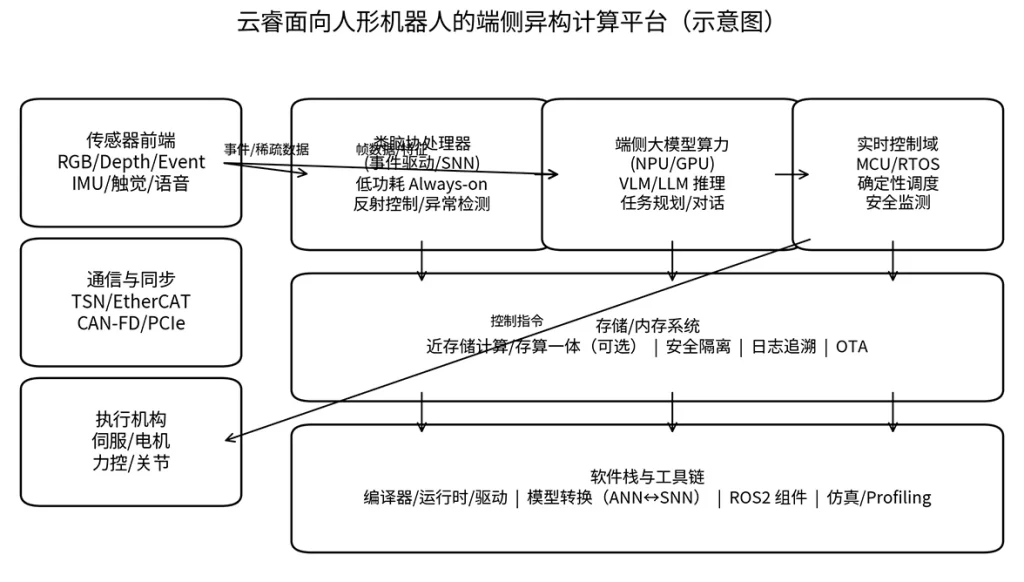
多传感器带宽与数据洪流
RGB/Depth/IMU/触觉/音频并行,帧数据会造成带宽瓶颈与“冯·诺依曼搬运能耗”。
长尾场景与鲁棒性
真实世界存在遮挡、反光、动态光照、碰撞与材质差异;模型容易失效,需要在线适应与异常检测。
安全与合规
人机共融场景必须具备安全监测、故障降级、可追溯日志;芯片级隔离与安全启动是基础能力。
研发周期与生态碎片化
算法、驱动、实时系统、机器人中间件(如 ROS2)链路很长,缺工具链就难以快速落地。
事件驱动与脉冲神经网络(SNN):让端侧感知更省电、更实时。
在线适应与学习机制:从“离线模型”走向“现场可用”。
事件相机与事件流视觉:高速运动场景的“低带宽高信息”方案。
近存储计算/存算一体:破解“搬运能耗”与带宽瓶颈。
类脑芯片工程化平台:打通类脑计算与机器人实时控制、软件栈和量产流程。